Researchers at Princeton University have built a swarm of interconnected mini-robots that “bloom” like flowers in response to changing light levels in an office. According to their new paper published in the journal Science Robotics, such robotic swarms could one day be used as dynamic facades in architectural designs, enabling buildings to adapt to changing climate conditions as well as interact with humans in creative ways.
The authors drew inspiration from so-called “living architectures,” such as beehives. Fire ants provide a textbook example of this kind of collective behavior. A few ants spaced well apart behave like individual ants. But pack enough of them closely together, and they behave more like a single unit, exhibiting both solid and liquid properties. You can pour them from a teapot like ants, as Goldman’s lab demonstrated several years ago, or they can link together to build towers or floating rafts—a handy survival skill when, say, a hurricane floods Houston. They also excel at regulating their own traffic flow. You almost never see an ant traffic jam.
Naturally scientists are keen to mimic such systems. For instance, in 2018, Georgia Tech researchers built ant-like robots and programmed them to dig through 3D-printed magnetic plastic balls designed to simulate moist soil. Robot swarms capable of efficiently digging underground without jamming would be super beneficial for mining or disaster recovery efforts, where using human beings might not be feasible.
In 2019, scientists found that flocks of wild jackdaws will change their flying patterns depending on whether they are returning to roost or banding together to drive away predators. That work could one day lead to the development of autonomous robotic swarms capable of changing their interaction rules to perform different tasks in response to environmental cues.
The authors of this latest paper note that plants can optimize their shape to get enough sunlight or nutrients, thanks to individual cells that interact with each other via mechanical and other forms of signaling. By contrast, the architecture designed by human beings is largely static, composed of rigid fixed elements that hinder building occupants’ ability to adapt to daily, seasonal, or annual variations in climate conditions. There have only been a few examples of applying swarm intelligence algorithms inspired by plants, insects, and flocking birds to the design process to achieve more creative structural designs, or better energy optimization.
The authors were interested in exploring adaptive and dynamic facades in architecture, inspired by past attempts to integrate biological elements to create “living buildings”: using panels of algae to generate energy and provide shade, for example. Most such efforts rely on arrays of rigid mechanical modules to respond to external stimuli, such as the Al Bahr Towers in Abu Dhabi. More recently, architects have explored arrays of soft modules for facades, such as bimetallic beams and shells that respond to shifts in temperature to control building ventilation and temperature.
Building a Swarm Garden
Merihan Alhafnawi, a mechanical engineer at Princeton, and co-authors turned to swarm robotics to design their proof-of-concept project, dubbed the Swarm Garden. They built an array of 40 modular, rearrangeable robotic units they called SGbots, connected via a Wi-Fi network to enable a shared communication protocol designed to facilitate collective decision-making.
Each bot has a back-facing ambient light sensor to detect lighting changes and a front-facing proximity sensor to enable it to find and communicate with its nearest neighbors. And each bot has an actuator designed to retract or extend a thin plastic sheet through a thin slot; the sheets can buckle or open up into a “bloom” in response to environmental stimuli.
Alhafnawi et al. designed two case studies to demonstrate the potential of their Swarm Garden. In the first, they used a Swarm Garden for adaptive shading, placing 16 SGbots on an office window and letting them operate continuously for three days. The bots fully extended their sheets to block sunlight when the light was especially strong, gradually buckling as the sun weakened and the room became darker. Additional simulations showed the array also worked well when placed horizontally in atrium spaces.
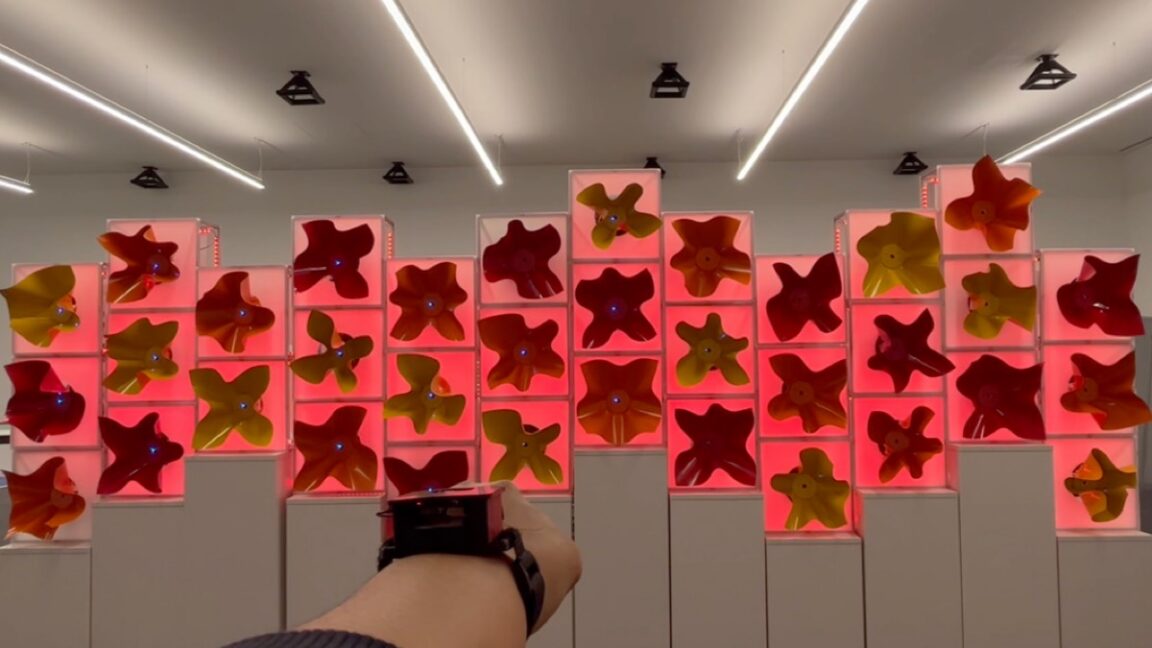
The second case study was designed to showcase the potential of swarm robots for creative interior design. This involved an array of 36 SGbots at a public exhibition in April 2024 at Princeton’s Lewis Center for the Arts. In one demonstration (see video above), users could cause the bots to “bloom” and retract using simple hand gestures. In another (see video below), users donned wearable devices so they could induce LED color changes with gestural arm movements. One of the co-authors even performed a live dance while equipped with a wearable device midway through the three-hour exhibition.
The next step is for the team to collaborate with architects to determine the feasibility of real-world deployment of Swarm Garden arrays. The authors also want to explore more sustainable and resilient materials since there is considerable stress on the plastic sheets from the buckling-to-blooming process. And they suggest employing kirigami-inspired cuts could lower actuation power.
“We envision a future where the built environment is increasingly inspired by living architectures, creating facades that constantly adapt to their surroundings and occupants,” Alhafnawi et al. concluded. “The Swarm Garden offers a glimpse into that future: an architectural swarm that collectively responds to sunlight and human interaction. It further shapes occupants’ spaces by being animated with movement, vibrant with colors, and beautiful in appearance, inspiring creativity and expression.”
Science Robotics, 2026. DOI: 10.1126/scirobotics.ady7233 (About DOIs).

Originally published at Ars Technica













